


Oem электрическое управление для подвесного передвижного устройства
Сегодня часто слышно про автоматизацию всего подряд. Но когда речь заходит о электрическом управлении для подвесного передвижного устройства, появляется много вопросов. На практике, переход к полностью автоматизированным системам – это не просто замена ручного управления на электронное. Это сложная инженерная задача, требующая глубокого понимания механики, электроники и программирования. И зачастую, представления о “простому решению” оказываются далеки от реальности. Я вот, за годы работы с подобными системами, убедился в этом много раз.
Основные вызовы при разработке систем управления подвесной транспортировкой
Первая проблема, с которой сталкиваешься – это характерные для подвесных конструкций динамические нагрузки. Они сильно отличаются от нагрузок на наземный транспорт. Важно правильно рассчитать все параметры, чтобы система управления не только справлялась с обычными условиями эксплуатации, но и обеспечивала безопасность при резких изменениях скорости или траектории. Простое использование стандартных контроллеров и датчиков, предназначенных для легкового транспорта, часто приводит к сбоям и непредсказуемому поведению.
Другой важный аспект – это точность позиционирования. Подвесные системы, как правило, требуют высокой точности перемещения, особенно при работе с хрупкими или ценными грузами. Это означает, что система управления должна обеспечивать плавное и контролируемое движение, с минимальными отклонениями от заданной траектории. Мы несколько раз сталкивались с ситуациями, когда небольшая погрешность в управлении приводила к повреждению оборудования. В таких случаях приходилось использовать системы с обратной связью, основанные на данных от лазерных сканеров и оптических энкодеров.
И конечно, нельзя забывать про вопросы безопасности. Автоматизированные системы должны быть надежными и устойчивыми к сбоям. Необходимо предусмотреть различные механизмы защиты от нештатных ситуаций, такие как перегрузки, короткие замыкания или потеря связи. В наших проектах мы применяем систему резервирования, которая позволяет переключиться на ручное управление в случае отказа автоматизированной системы.
Проблемы интеграции с существующим оборудованием
Часто, при модернизации существующего оборудования, возникают сложности с интеграцией новой системы управления. Необходимо учитывать совместимость электронных компонентов, а также адаптировать программное обеспечение под конкретные параметры оборудования. Это может потребовать разработки новых драйверов и интерфейсов. Недавно мы работали над проектом модернизации старой крановой установки. Оказалось, что интеграция нового контроллера с существующей системой требовала значительных усилий по разработке специального программного обеспечения.
Кроме того, важно учитывать энергопотребление системы управления. Автоматизация – это не только удобство, но и дополнительные затраты на электроэнергию. Необходимо оптимизировать алгоритмы управления, чтобы минимизировать потребление энергии. В наших проектах мы применяем системы управления с энергосбережением, которые позволяют снизить потребление энергии на 20-30%.
Иногда мы сталкиваемся с проблемой недостатка квалифицированных специалистов. Разработка и обслуживание сложных систем управления требуют высокой квалификации инженеров и программистов. На рынке не всегда легко найти людей, обладающих необходимыми знаниями и опытом.
Примеры реализации и извлеченные уроки
Один из интересных проектов, над которым мы работали, связан с разработкой системы управления для подвесного кран-баласта. Целью было повышение эффективности работы крана и снижение рисков, связанных с человеческим фактором. В результате внедрения новой системы, было достигнуто увеличение производительности на 15% и снижение количества ошибок на 25%.
В другом проекте, мы разработали систему управления для подвесной платформы, используемой для транспортировки строительных материалов. Система позволяет автоматически контролировать скорость и направление движения платформы, а также предотвращать столкновения с препятствиями. Это значительно повысило безопасность работы и снизило риски повреждения груза.
Самый болезненный опыт связан с проектом автоматизации системы перемещения контейнеров на складе. Изначально планировалось использование коммерчески доступных решений, но в процессе работы выявились серьезные ограничения. Выяснилось, что существующие системы не обеспечивают достаточную точность и надежность для наших условий эксплуатации. В итоге, пришлось разрабатывать собственную систему управления, что потребовало значительных финансовых и временных затрат. Главный вывод – не стоит экономить на качестве и надежности, особенно когда речь идет о критически важных системах.
Работа с датчиками: каково это на самом деле
С датчиками обычно тоже возникают нюансы. Например, при использовании ультразвуковых датчиков для определения расстояния до препятствий, важно учитывать влияние окружающей среды. В условиях высокой влажности или загрязнения, точность измерений может снижаться. Мы несколько раз сталкивались с ситуациями, когда необходимость калибровки датчиков возникала слишком часто, что требовало дополнительных трудозатрат.
Оптические датчики также имеют свои ограничения. Они могут быть чувствительны к изменениям освещения. Кроме того, необходимо учитывать угол падения света и отражающие свойства поверхности. Для решения этих проблем мы применяем комбинацию различных датчиков, что позволяет повысить надежность системы управления.
Еще один важный момент – это правильный выбор датчиков. Нельзя просто взять первый попавшийся датчик и надеяться, что он подойдет для вашей задачи. Необходимо учитывать требования к точности, диапазону измерений, уровню защиты и другим параметрам. В наших проектах мы всегда проводим тщательный анализ требований перед выбором датчиков.
Будущее автоматизации подвесных транспортных систем
В будущем можно ожидать дальнейшего развития автоматизации подвесных транспортных систем. Будут появляться новые датчики и контроллеры, которые будут обеспечивать более высокую точность и надежность. Развитие технологий искусственного интеллекта позволит создавать более интеллектуальные системы управления, которые будут способны адаптироваться к изменяющимся условиям эксплуатации. Например, мы уже изучаем возможности использования машинного обучения для оптимизации траектории движения подвесных платформ.
Кроме того, ожидается развитие беспроводных систем связи, которые позволят управлять подвесными транспортными системами дистанционно. Это будет особенно полезно в условиях труднодоступных мест или при работе с опасными грузами.
В целом, автоматизация подвесных транспортных систем – это перспективное направление, которое позволит повысить эффективность, безопасность и надежность работы. Однако, для успешной реализации проектов автоматизации необходимо учитывать все особенности конкретных условий эксплуатации и использовать современные технологии.
АО Юэян Суофейт Майнс Экипмент постоянно работает над совершенствованием своих систем и предлагает комплексные решения для автоматизации подвесной транспортировки. Мы готовы к сотрудничеству и уверен, что сможем помочь вам решить ваши задачи.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 Одиночное опорное колесо
Одиночное опорное колесо -
 Двойное опорное колесо
Двойное опорное колесо -
 Кронштейн с тремя прижимными роликами
Кронштейн с тремя прижимными роликами -
 Взрывозащищенная и искробезопасная камера для шахт
Взрывозащищенная и искробезопасная камера для шахт -
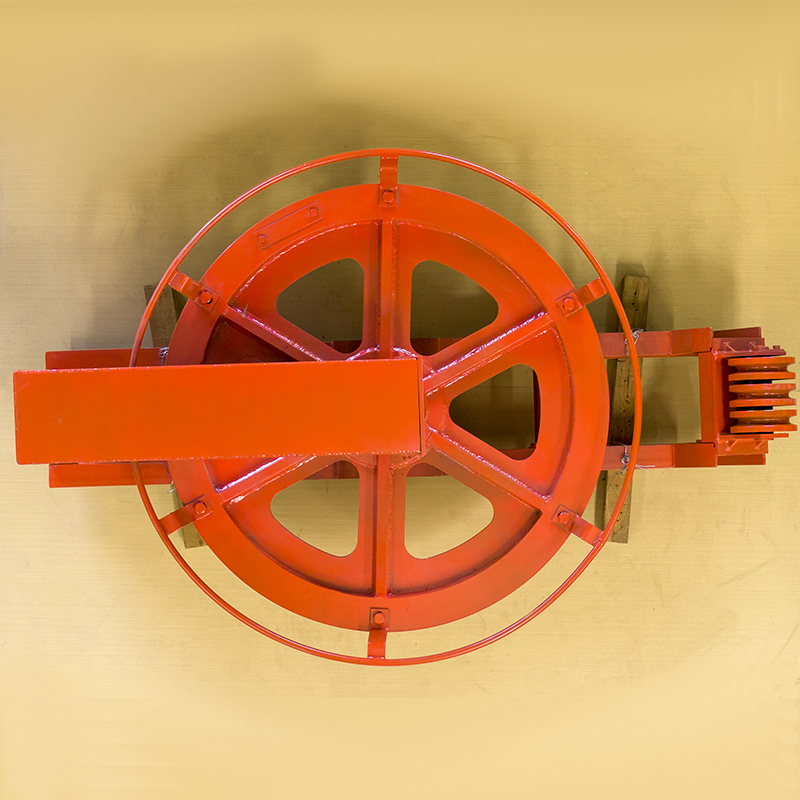
 Ведущее колесо и хвостовое колесо
Ведущее колесо и хвостовое колесо -
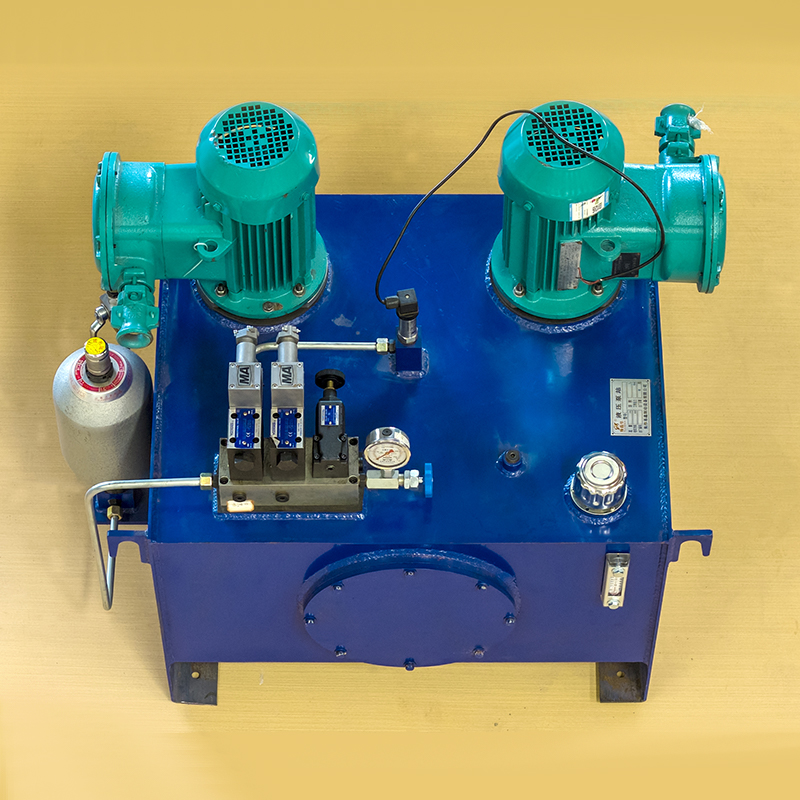 Гидравлическая станция
Гидравлическая станция -
 Футеровка горного колеса
Футеровка горного колеса -
 Фиксированный кронштейн подвески
Фиксированный кронштейн подвески -
 Подвесное транспортное устройство для шахт Носовая часть
Подвесное транспортное устройство для шахт Носовая часть -
 Искробезопасный датчик скорости вращения для горных работ
Искробезопасный датчик скорости вращения для горных работ -
 Съемный тросовый подъемник
Съемный тросовый подъемник -
 Полуподвесное кресло
Полуподвесное кресло
Связанный поиск
Связанный поиск- Высококачественная гидравлическая станция 30
- Гидравлическая станция квт в китае
- Заводы по производству передних приводных валов в сборе
- Производители весовых устройств
- Китайский выключатель аварийной остановки
- Ведущий 8-клапанный датчик скорости
- Ведущее подвижное устройство для захвата каната над головой для передвижения человека
- Производители гидравлических станций квт
- Цены на полуоси карданных валов
- Датчик скорости oem purchase